Cloud Statistics
//VERSION=3
function setup() {
return {
// The script can be adapted for S2L1C by removing the "SCL" band
input: ["CLM", "SCL", "dataMask"],
output: { bands: 4 },
mosaicking: "ORBIT"
};
}
function isNotCloudy(smp) {
// Check if cloud using s2cloudless and scene classification
let clm = smp.CLM;
let scl = smp.SCL;
if (clm == 1){
// s2cloudless
return false;
} else if (scl == 1 || scl == 3 || scl == 8 || scl == 9 || scl == 10){
// saturated/defective, cloud shadow, cloud medium probability,
// cloud high probability, cirrus
return false;
} else {
return true;
}
}
function evaluatePixel(samples) {
var noOfClearPx = 0;
var noOfSamples = 0;
// Loop over available samples (images)
for (i=0;i<samples.length;i++)
{
//If there is no value available, we avoid further count
if (!samples[i].dataMask) continue;
noOfSamples++;
//Criteria for cloudless pixel
if (
isNotCloudy(samples[i])
) noOfClearPx++;
}
//transparent if there is no data
if (noOfSamples==0) return [0,0,0,0];
// Ratio of non-cloudy pixels
var avg = noOfClearPx / noOfSamples;
// Color scheme for visualisation
var color= colorBlend(avg,
[0, 0.1, 0.2, 0.3, 0.4, 0.5, 0.6, 0.7, 0.8, 0.9, 1.0 ],
[
[0/255,0,0/255], // -> 0 = #000000
[141/255,0/255,0/255], // -> .1 = #8D0000
[219/255,36/255,36/255], // -> .2 = #DB2424
[236/255,125/255,0/255], // -> .3 = #EC7D00
[236/255,199/255,0/255], // -> .4 = #ECC700
[111/255,161/255,32/255], // -> .5 = #6FA120
[75/255,126/255,39/255], // -> .6 = #4B7E27
[72/255,168/255,146/255], // -> .7 = #48A892
[63/255,142/255,185/255], // -> .8 = #3F8EB9
[133/255,78/255,144/255], // -> .9 = #854EA4
[85/255,34/255,115/255] // -> 1.0 = #552273
]);
return[color[0],color[1],color[2],1];
}Evaluate and Visualize
General description of the script
For a given time-range, this script counts the number of Sentinel-2 L2A cloud-free pixels based on the s2cloudless algorithm and the Sen2Cor scene classification (SCL) data. The SCL categories used to detect clouds in the current version of the script are:
- saturated/defective
- cloud shadow
- cloud medium probability
- cloud high probability
- cirrus.
The categories can be easily modified to fit users’ needs. Furthermore, the SCL band can be removed from the script for compatibility with Sentinel-2 L1C images.
The script returns the ratio of cloud-free pixels against the total number of pixels over the time period.
Description of representative images
The cloud statistics over the north of Spain for July 2020. The map shows a higher occurence of clouds along the North coastline (Asturias) than inland. Processed by Sentinel Hub.
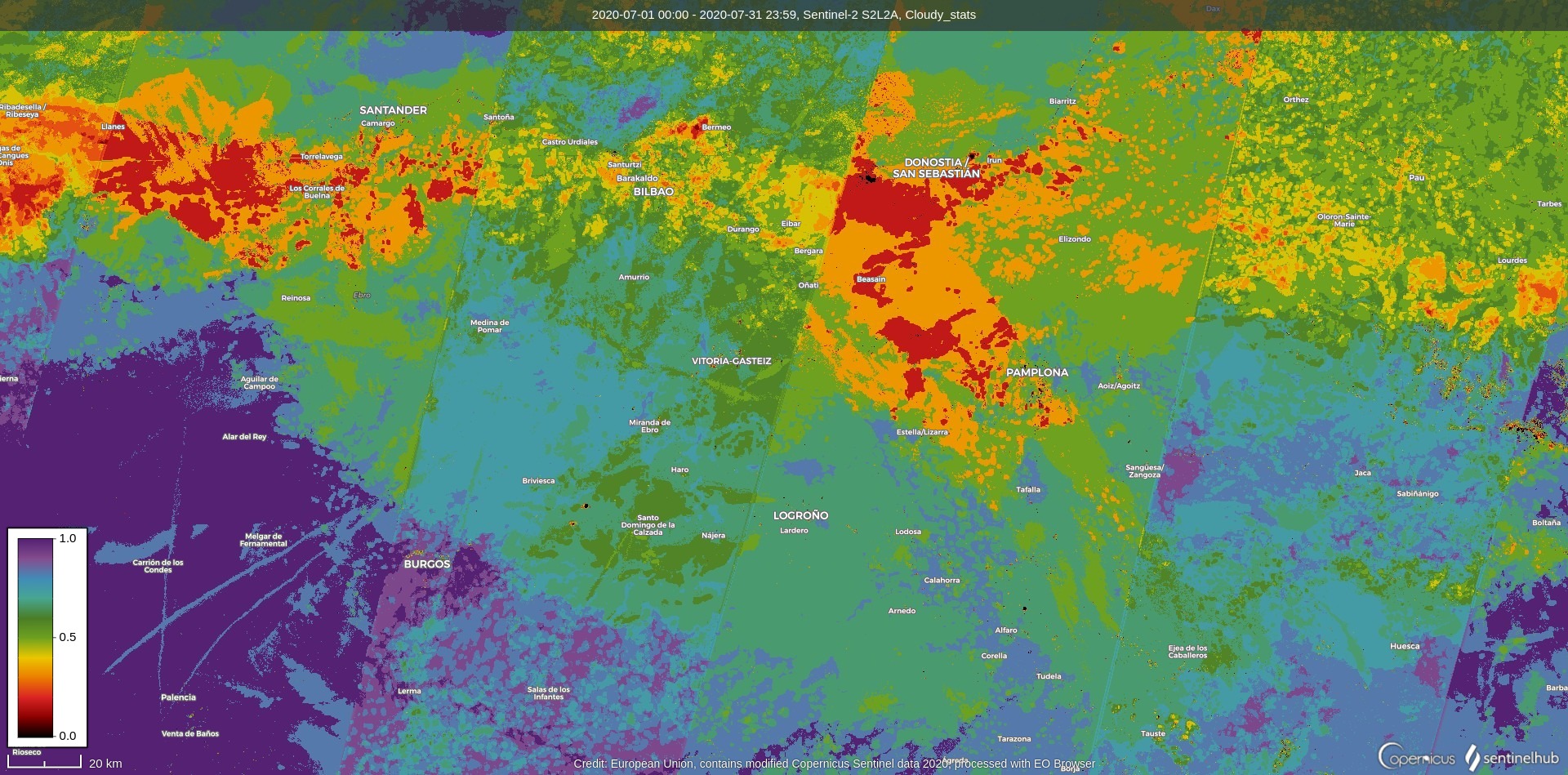
Above is an example output from the Cloud Statistics script: for each Sentinel-2 pixel, the values represent the ratio of cloud-free images over a given time period to the total number of images for the same period. Therefore, a value of 1 (represented in purple) means that 100% of the images in the time-series were cloud-free, and a value of 0 (in black) signifies that there are no cloud-free images available.
Note: users are free to improve this page and modify any part of the script.